Productos
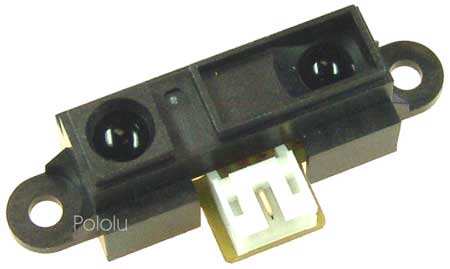
Medidor de Distancia Infrarrojo 10-80cm
Medidor de Distancia Infrarrojo 10-80cm (no incluye cable de conexión)
COD: P000136
Peso: 0.001 Kg
Disponibilidad: Sin Stock
ARS 1950.00
El producto no está disponible para la venta en este momento
Características
The GP2Y0A21 Sharp distance sensor is a great way to add obstacle avoidance or motion sensing to your robot or any other project. With a detection range of 4" to 32" and an analog voltage indicating the distance, this sensor is very easy to use.
Overview
The Sharp distance sensors are a popular choice for many projects that require accurate distance measurements. This IR sensor is more economical than sonar rangefinders, yet it provides much better performance than other IR alternatives. Interfacing to most microcontrollers is straightforward: the single analog output can be connected to an analog-to-digital converter for taking distance measurements, or the output can be connected to a comparator for threshold detection. The detection range of this version is approximately 10 cm to 80 cm (4" to 32"); a plot of distance versus output voltage is shown below.
The GP2Y0A21 uses a 3-pin JST connector. It is simple to solder three wires to the sensor where the connector pins are mounted (see the lower picture to the right). When looking at the back, the three connections from left to right are power, ground, and the output signal.
 |
Feature summary
- operating voltage: 4.5 V to 5.5 V
- average current consumption: 30 mA (typical)
- distance measuring range: 10 cm to 80 cm (4" to 32")
- output type: analog voltage
- output voltage differential over distance range: 1.9 V (typical)
- response time: 38 񋯨 10 ms
- package size: 29.5x13.0x13.5 mm (1.16x0.5x0.53")
- weight: 3.5 g (0.12 oz)
 |
Linearizing the output
The relationship between the sensor's output voltage and the inverse of the measured distance is approximately linear over the sensor's usable range. The GP2Y0A21YK data sheet contains a plot of analog output voltage as a function of the inverse of distance to a reflective object. You can use this plot to convert the sensor output voltage to an approximate distance by constructing a best-fit line that relates the inverse of the output voltage (V) to distance (cm). In its simplest form, the linearizing equation can be that the distance to the reflective object is approximately equal to a constant scale factor (~27 V*cm) divided by the sensor's output voltage. Adding a constant distance offset and modifying the scale factor can improve the fit of this line.