Productos
ComMotion Motor Driver Shield
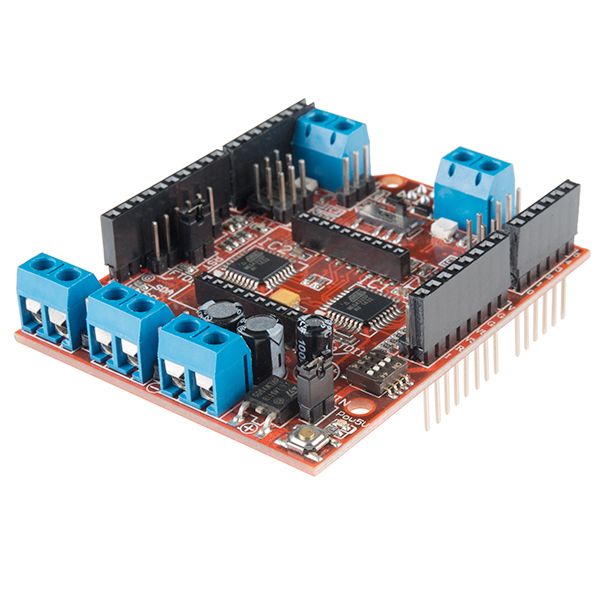
Shield para controlar 4 motores de hasta 2.5A (4A pico). Posee comunicación I2C y puede ser remotamente controlado. Incorpora dos micros Atmega328P.
COD: SFROB13257
Peso: 0.059 Kg
Disponibilidad: En Stock
ARS 96497.00
El producto no está disponible para la venta en este momento
Características
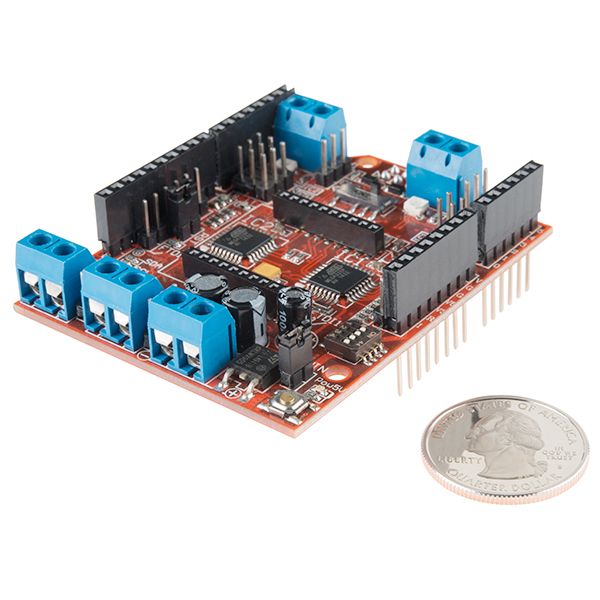
Description: We are pleased to introduce to you the ComMotion Motor Driver Shield, a 4 channel motor controller that can communicate via I2C and be wirelessly controlled. This shield allows you to be able to control up to 4 motors at a time, read their encoders, and monitor their current draw all from one board. This powerful little shield fits snuggly on top of your RedBoard, Arduino, or any other development board that utilizes the R3 layout.
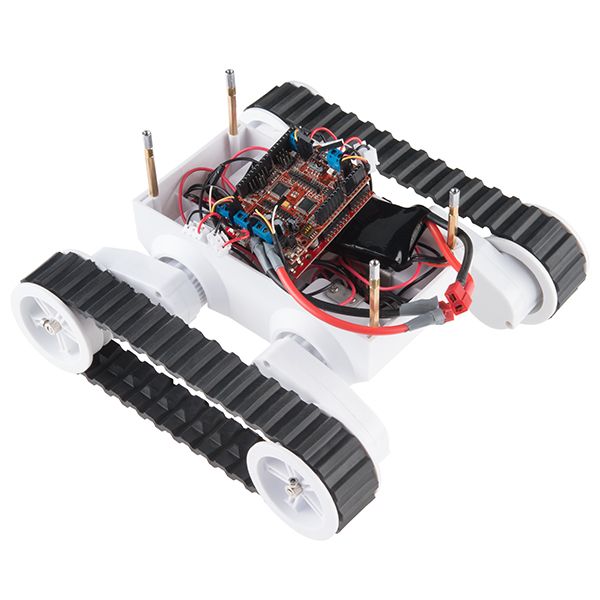
The ComMotion shield has been designed to drive 4 DC brushed motors at up to 2.5A continuous, each with peak currents of up to 4A per motor. With the preset configurations you will be able to easily control robots with omni or mecanum wheels by simply sending the ComMotion only three simple values: Velocity, Angle and Rotation. Onboard, the two ATmega328P processors will then do all the math required to calculate the correct speed for each individual motor.
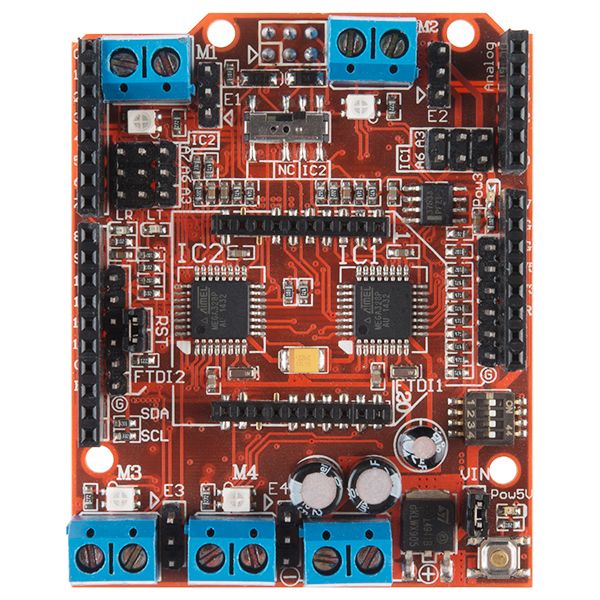
Each ATmega328P processor even has its own serial port broken out into an FTDI header. These serial ports can be used for GPS, Bluetooth and LCD modules while leaving your Arduino serial port free for uploading and debugging code. The serial port on MCU2 is also broken out into a socket for an XBEE or WiFly wireless transceiver with voltage translation circuitry. While in the default configuration, the ComMotion shield will be able to accept serial commands directly from the serial port on MCU2. Just plug in a pre-configured Xbee, WiFly or Bluetooth module and you have instant wireless control!
Features:
- Two ATmega328P (16MHz) Processors
- Supply Voltage: 6V – 16V
- Logic Voltage: 5V @ 1000mA
- Wireless Support: Xbee / WiFly socket with voltage translation
- Xbee/WiFly Power: 3.3V @ 300mA
- Analog Inputs: 5x 10bit
- Motor Drivers: 4x FET“H” bridge
- Motor Current Continuous: 2.5A (each motor)
- Motor Current Stall: 4A (each motor)
- Current Monitor Range: 0A – 5A (each motor)
- Current Monitor Resolution: ~5mA (each motor)
- I²C Bus Voltage: 5V or 3.3V (selected by IO_REF pin)
- I²C Bus Speed: 100kbs
- I²C Addresses: 16 selectable pairs (software configurable)
- Serial Ports: 2x 5V TTL logic (FTDI headers)
Documents: